Final Battery Heater Design
Posted on Fri 06 December 2024 in ADVVAN
My Final Battery Heater Design: Keeping Things Cozy in Winter
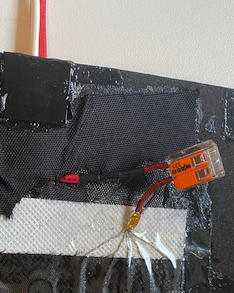
This is the heater pad system I put together to keep my batteries from freezing their circuits off in the winter. It keeps the temperature right around 80-90°F, which is warm enough to keep the batteries happy and also doubles as a toasty hand warmer while I'm tinkering with stuff. The pad itself came with a built-in sensor that turns it on when things get “around freezing”, but I wanted more control. So, I snipped that sensor off and hooked it into a smarter setup.
The system is powered by my 24V house batteries and uses a couple of key components to make everything run smoothly and efficiently. Let's get into the details.
Here's what I'm using:
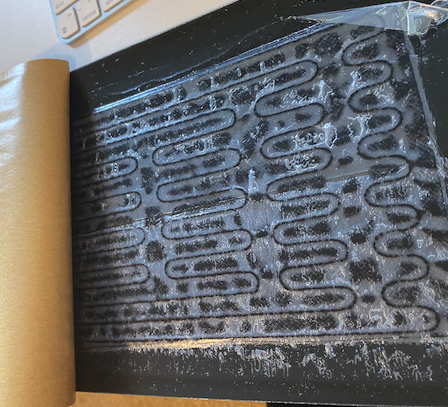
- Facon Heater Pad (Model CW-ST725):
- Runs at 13.5V and pulls about 78 watts.
- Big enough to do the job (about 25” x 7.5”).
- I modified this by cutting out its “dumb” sensor, which only turns on when it feels like it.
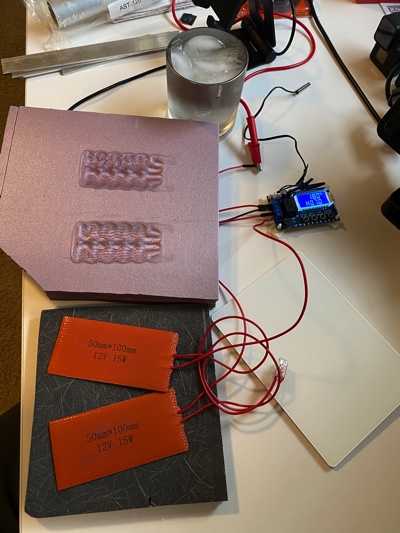
- DROK Temperature Control Board:
- This little guy is the brains of the operation. It lets me set exact temperature limits for when the pad kicks on and off. No more guessing.
- TOBSUN Buck Converter:
- Converts the 24V from my house batteries down to 5V for the control board and other electronics.
- It's rated for 75 watts, so it's got more than enough juice to handle this setup.
- Home Assistant-Controlled Relays:
- These give me full control of when the heater turns on. I can press a button in Home Assistant or let the automation handle it for me.
Power Details (Because Numbers Matter)
- When Idle: It barely sips power at 0.001A.
- When Heating: It pulls about 0.48A, which is roughly 12 watts.
How It's Set Up
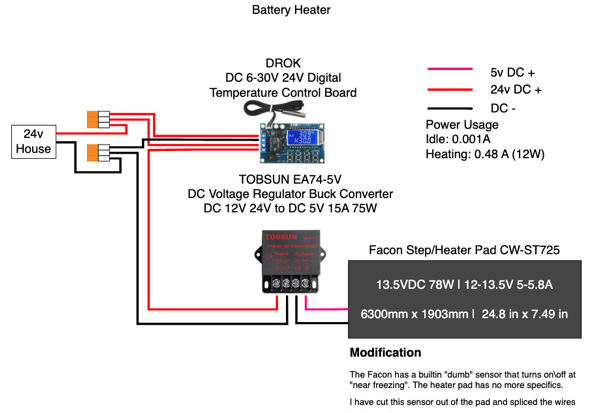
The wiring diagram I made shows the heater connected directly to the 24V house batteries, but that's not exactly how I'm going to use it. Instead, I'm hooking it up to relays controlled by Home Assistant. Why? Because automation is awesome.
Here's how it'll work
- Manual Control: I can flip the heater on or off from the Home Assistant app if I just want to use it like a big, warm switch.
- Automatic Control: I'll set up rules to turn the heater on when temps drop below a certain level or when the van is in “Adventure Mode” (aka, not parked at home).
This setup gives me flexibility to keep the batteries warm when they need it, without wasting power when they don't. It's especially handy when I'm not around to babysit the system.
Eventually, this whole thing is going inside a dedicated winter battery box. The box will help trap the heat and protect the batteries from freezing temperatures. It's one more layer of protection for those really cold nights, especially when the van's out in the wild.
Why I'm Loving This Setup
This design just works. It's efficient, it's smart (thanks to Home Assistant), and it's built with reliable components I know won't let me down. Plus, it's super satisfying to build something that solves a real problem without breaking the bank.
All the parts are available on Amazon, so if you're dealing with cold-weather battery woes, you can totally DIY this. Whether you're keeping batteries warm or just want a heated surface for whatever reason, this setup is pretty flexible.
Alright, that's it! If you've got questions, ideas, or just want to chat about heaters, drop me a comment. I'm always up for a good nerd-out session.
Here's the wiring diagram in case you're a visual person like me.